控制器的多轴运动控制固件可提供当今多轴控制器所需的特征和性能,而且经过精心设计,能够轻松集成于运动控制系统中,且易于使用。 控制器可为各种自动化和机器人应用提供广泛的编程功能。
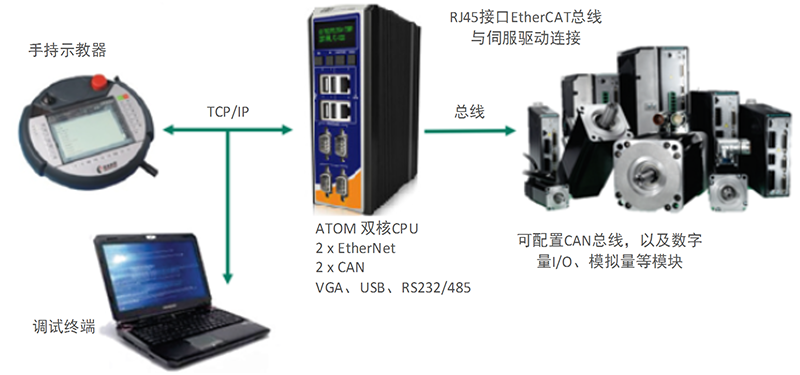
控制器以内嵌于工业计算机中的高级控制算法为一大特色,适用于开放式和模块化的机械控制环境。其功能强大且实时的编程语言可支持在用户程序级执行抢先多任务处理。 采用国际主流标准EtherCAT总线技术,支持EtherCAT或CANopen总线式伺服驱动单元和绝对式伺服电机。配备上位机软件Controlstudio,方便用户示教编程,并配有标准USB接口,支持程序管理,状态监控、故障诊断等操作。支持标准TCP、Modbus RTU通信协议,可与外部PLC、传感器、视觉系统等进行数据传输。Controlstudio是一个免费、基于windows的整合式开发环境,适用于编辑和调试Mbasic语言程序。
|
※ 系统图片
|
|
|
|
※ 运动
|
-
单轴运动(移动、点动)
-
多轴运动(移动、圆弧、样条曲线)
-
主从(凸轮运动、传动装置)
-
运动属性(sine 加速度、梯形速度、圆滑过渡、定制)
-
模拟仿真(离线程序验证)
-
即时运动控制(速度重写、修正、补偿)
-
传送带跟踪功能(线性和旋转传送带拾取和放置)
-
3D补偿表(用于修正机械不准确情况)
-
多轴对机器人的同步协同;
-
先进的空间内插、动力学模式。
|
|
※ 接口
|
-
控制器:以太网接口、串口通信接口
-
现场总线:Ethercat ,Canopen ,Modbus
|
|
※ 系统
|
-
实时linux系统;
-
在用户程序上实现抢先的多任务处理;
-
基于位置的事件生成,达到微妙级控制精度;
-
与C和C++的集成;
-
类VB的M-basic运动编程语言;
|
|
※ 硬件
|
-
CPU:1.86Ghz Intel Atom N2800 双核处理器;
-
RAM:1GB 1066Mhz DDR3 ;
-
储存:CompactFlash卡插槽,可定制容量;
-
以太网:RJ45接口,用于进行主机通讯 ;
-
Ethercat RJ45接口,用于进行实时运动控制;
|
|
※ 定制能力
|
-
定制软件解决方案:可根据客户的需求开发所需的功能包;
-
控制器软件也支持其他工业的电脑平台;
-
与Codesys软PLC的集成
|
|
※ 应用案例
|
-
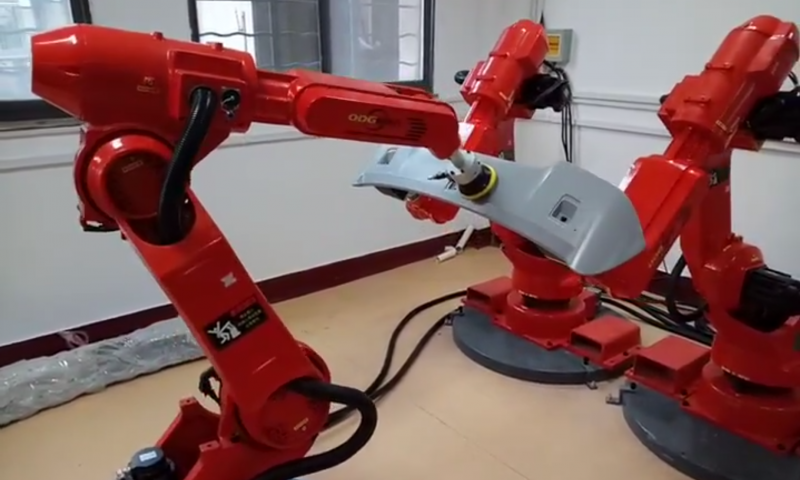
已经成功应用于六轴机器人、DELTA、SCARA机器人上;
-
台式铣床,5轴CNC铣床;
-
影像显示产业应用的机械设备:激光加工、计量和丝网印刷;
-
用于制造锂电离子电池的机械;
-
测试和测量系统,用于视觉检测的光学系统;
|
|
※ 应用案例
|
|
|
|
|